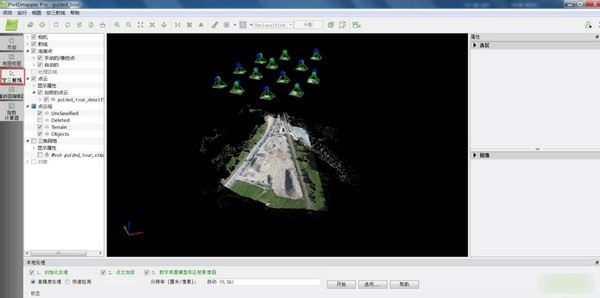
KKX小編為本文中給大家分享的pix4dmapper是一款用于無人機自動航測功能的三維建模軟件,集全自動、快速、專業精度為一體的無人機數據和航空影像數據處理軟件,也是是目前市場上獨一無二的可以讓專業用戶實現云計算功能,而且可以快速的生成最精準的報告,搭配免費的PIX4Dcaptureapp實現自動飛行和影像數據傳輸。有需要使用Pix4Dmapper的朋友快通過下面kkx分享地址帶走吧!
Pix4Dmapper優勢
1.專業化、簡單化--PIX4D mapper讓攝影測量進入全新的時代,整個過程完全自動化,并且精度更高,真正使無人機變為新一代專業測量工具。只需要簡單地操作,不需專業知識,飛控手就能夠處理和查看結果,并把結果發送給最終用戶。
2.空三、精度報告--PIX4D mapper通過軟件自動空三計算原始影像外方位元素。利用PIX4UAV的技術和區域網平差技術,自動校準影像。軟件自動生成精度報告,可以快速和正確地評估結果的質量。提供了詳細的、定量化的自動空三、區域網平差和地面控制點的精度。
3.全自動、一鍵化--PIX4D mapper無需IMU,只需影像的GPS位置信息,即可全自動一鍵操作,不需要人為交互處理無人機數據。原生64位軟件,能大大提高處理速度。自動生成正射影像并自動鑲嵌及勻色,將所有數據拼接為一個大影像。影像成果可用GIS和RS軟件進行顯示。
4.云數據、多相機--PIX4D mapper利用自己獨特的模型,可以同時處理多達10000張影像。可以處理多個不同相機拍攝的影像,可將多個數據合并成一個工程進行處理。
Pix4Dmapper特色
無人機航測通常低空飛行,空域申請便利,受氣候條件影響較小。
升空準備時間15分鐘即可、操作簡單、運輸便利。
車載系統可迅速到達作業區附近設站,根據任務要求每天可獲取數十至兩百平方公里的航測結果。
對起降場地的要求限制較小,可通過一段較為平整的路面實現起降,在獲取航拍影像時不用考慮飛行員的飛行安全,對獲取數據時的地理空域以及氣象條件要求較低,能夠解決人工探測無法達到的地區監測功能。
Pix4Dmapper應用領域:航測制圖、災害應急、安全執法、農林監測、水利防汛、電力巡線、海洋環境、高校科研。
Pix4Dmapper功能
1.自動生成正射影像并自動鑲嵌及勻色,將所有數據拼接為一個大影像。影像成果可用GIS和RS軟件進行顯示。全自動、一鍵化--PIX4Dmapper無需IMU,只需影像的GPS位置信息,即可全自動一鍵操作,不需要人為交互處理無人機數據。原生64位軟件,能大大提高處理速度。
2.專業化、簡單化--PIX4Dmapper讓攝影測量進入全新的時代,整個過程完全自動化,只需要簡單地操作,不需專業知識,飛控手就能夠處理和查看結果,并把結果發送給最終用戶。并且精度更高,真正使無人機變為新一代專業測量工具。
3.云數據、多相機--PIX4Dmapper利用自己獨特的模型,可以同時處理多達10000張影像。可以處理多個不同相機拍攝的影像,可將多個數據合并成一個工程進行處理。
4.空三、精度報告--PIX4Dmapper通過軟件自動空三計算原始影像外方位元素。提供了詳細的、定量化的自動空三、區域網平差和地面控制點的精度。利用PIX4UAV的技術和區域網平差技術,自動校準影像。軟件自動生成精度報告,可以快速和正確地評估結果的質量。
亮點
1、支持所輸入的數據:
航空(垂直和傾斜)和地面影像支持
處理各種影像,包括從任意角度,地面,無人機或常規航攝拍攝的影像
2、從視頻(MP4或AVI格式)圖像支持
軟件自動從視頻中提取幀并創建項目
任意相機(袖珍,單反,多光譜,GoPro,Tetracam,大像幅)
采用任意相機獲取的影像,從小型到大型傳感器(多達40MP),從消費者級別到高度專業化的相機
3、同一個項目支持多個相機
采用多個相機創建項目,一起處理數據(如近紅外與紅綠藍彩色)
4、PIX4D支持標準多鏡頭
更穩健,更精確,更快速地處理知名廠家(Tetracam, Airinov, MicaSense,WaldoAir)的多個多波段同步相機組(陣列)數據
5、多種文件類型(.jpg,單波段或多波段Tiff)
輸入多種文件格式,包括單波段和多波段影像
控制點編輯或導入(.csv,.txt)
導入或編輯控制點,提高項目的精度方,全球或任意坐標系,支持米和英尺單位從已有的坐標系統,或者您定制的本地坐標系選擇
支持相機位置和外方位角元素(omega, phi, kappa)
從GPS/IMU計算優化相機位置和外方位角
6、PIX4D外部點云導入
從不同數據源導入點云,如激光掃描LiDAR,用來生成DSM和正射影像鑲嵌圖
7、PIX4D數據處理
快速檢查處理模式:數分鐘內初步處理項目,得到低分辨率結果
快速檢查質量報告:現場評估影像質量和完整性
8、PIX4D處理模板
通過使用自動或定制的模板自動生成需要的成果
9、PIX4D相機自檢校
優化相機內部參數.如焦距,像主點和鏡頭畸變.不需要外部軟件或第三方的相機校正報告
10、自動空三和光束法區域網平差
無論是否有相機位置和外方位元素都可自動處理
11、自動點云加密,半全局匹配
生產高密度和精細的三維點云,可以作生成DSM和正射影像鑲嵌圖
12、PIX4D點云濾波和平滑
使用預設或編輯點云濾波和平滑選項
13、自動點云分類和DTM抽取 (BETA)
自動去除點云中的建筑和植被,生成貼近地面的DTM和等高線.額外的控制,可以在rayCloud中選擇和刪除點來改善DTM生成
14、自動亮度和顏色校正
亮度,光照度變化自動補償,影像顏色自動平衡
15、質量報告
評估項目的質量
16、項目合并
分部單獨處理,合并為一個項目
17、項目區域定義
導入shp文件,或者在正射影像鑲嵌圖和點云加密/濾波繪制區域來選定生成成果的邊界
18、項目分割
自動分割大項目為較小的項目,以便更高效地處理大規模數據
19、正對性的特征提取
對高分辨/高重疊率的圖像能夠提高處理速度
20、支持GPU
利用NVidia顯卡的GPU,初始化處理的速度可提高10% - 75%。GPU還用于點云加密和半全局匹配
更新日志
*新的GCP添加界面,提高控制點添加的速度和精度
*新的rayCloud編輯器
*不僅支持無人機數據,還支持航片、傾斜攝影測量和近景攝影測量
*沒有GPS數據,也可以處理



 Snipaste屏幕截圖軟件 v2.6.8 綠色免費版
Snipaste屏幕截圖軟件 v2.6.8 綠色免費版 After Keying(AE視頻摳圖插件) v1.0.3綠色版
After Keying(AE視頻摳圖插件) v1.0.3綠色版 GoToMeeting視頻會議系統 v8.38破解版
GoToMeeting視頻會議系統 v8.38破解版 多桌面切換器綠色漢化版
多桌面切換器綠色漢化版  網格管理系統 V2.26官方版
網格管理系統 V2.26官方版 Jboot(微服務框架) v3.9.4官方版
Jboot(微服務框架) v3.9.4官方版![wxapkg解包器 V5.1.5綠色版[暫未上線]](http://www.27lzpaw.cn/uploadfile/2022/0902/2022090216123372.jpg) wxapkg解包器 V5.1.5綠色版[暫未上線]
wxapkg解包器 V5.1.5綠色版[暫未上線] 周易公司起名大全軟件 V2022VIP破解版
周易公司起名大全軟件 V2022VIP破解版